
Fakulta metalurgie a materiálového inženýrství a Fakulta strojní Vysoké školy báňské — Technické univerzity Ostrava nabízí studijní programy v souladu s potřebami trhu práce. Jeden z projektů inovoval studijní program Materiály a technologie pro automobilový průmysl na Katedře materiálů a technologií pro automobily prostřednictvím zavedení experimentálního vozidla Buggy 260 do výuky.
Buggy 260 slouží pro výuku, experimenty zaměřené na technologii montáže vozidla, údržbu a kontrolu provozních kapalin a kontrolu dílů podléhajících intenzivnímu opotřebení. Za kvalitu výuky odpovídá řešitelský tým projektu z Katedry materiálů a technologií pro automobily na FMMI a zaměstnanci společnosti Visteon-Autopal. Vzájemná spolupráce odborných asistentů a odborníků z praxe zvyšuje kvalifikaci a následné uplatnění studentů v zaměstnání. Buggy 260 dále slouží ke zpracování bakalářských a diplomových prací. Jedním ze zadání diplomových prací bylo stanovení technologického postupu montáže, kterého se ujal Vladimír Zbožínek.

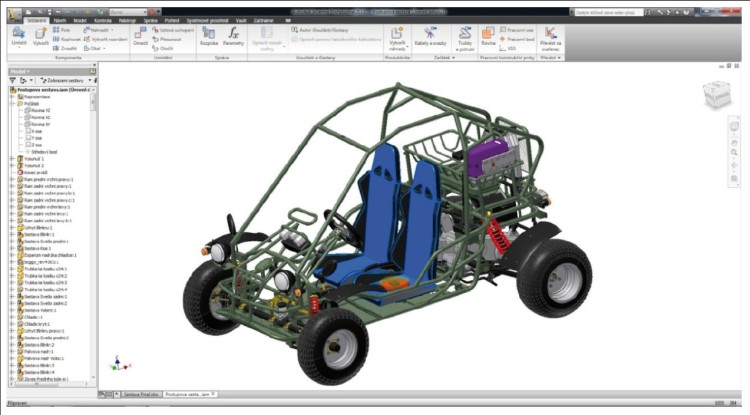
Karoserie dvoumístného vozidla, určeného pro jízdu po silnici i po nezpevněných komunikacích, je svařena z trubek o průměru 32 mm. Podlaha a spodní rám stroje tvoří jednu svařovanou sestavu. Vrchní část rámu, sloužící k ochraně posádky vozidla, je taktéž svařena z trubek. Vozidlo je vybaveno čtyřtaktním zážehovým motorem o výkonu 11 kW a objemu 257 cm3, který pohání přes variátor a stálý převod zadní nápravu. Součástí převodového ústrojí je diferenciál a odstředivá spojka.
Technologický postup montáže
Kvalitní softwarové a technické vybavení je pro současné školství nezbytné. Mimo vlastnictví vozidla Buggy 260 podporují výuku, výzkum a vývoj na Katedře materiálů a technologií pro automobily CAD systémy Catia V5R10 a Autodesk Inventor Professional 2010. Konzultační a poradenskou činnost firmy Visteon-Autopal doplňuje možnost využit pro výuku a experimenty skenovací zařízení, jako jsou Atos a Tritop.
Technologický postup montáže vychází ze zpracování montážních výkresů sestav a metodiky zpracování 3D modelu Buggy 260 s podporou CAD systémů, příkladu konkrétního postupu montáže a výsledného zprovoznění vozidla. Technologický postup montáže ovlivňuje mnoho činitelů, projevujících se v komplikovanosti a sériovosti montáže. Experimentální vůz lze zařadit do relativně složitých a komplexních součástí. Z těchto hledisek se jedná o kusovou montáž vozidla.
Technologický postup musel být sestaven tak, aby jednoznačně popsal montáž dílů do jednotlivých sestav, vedoucích ke kompletnímu sestavení a zprovoznění Buggy 260. Členění postupu vzniká postupnou prvotní montáží, při které se celková montáž rozděluje do několika dílčích postupů, které jsou provedeny formou montážních výkresů sestav. Montážní výkresy jsou koncipovány jako prostorové sestavy, obsahující 3D pohledy sestavy, včetně montovaných dílů, kusovník montovaných dílů a schéma montáže, ze kterého je patrná souslednost montovaných dílů.
Zpracování 3D modelu
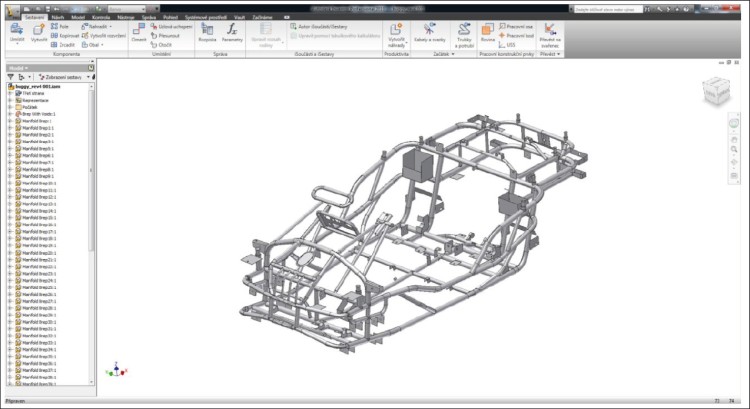
Základem montážních sestav technologických postupů jsou 3D modely rozloženého pohledu buggy. Tvorba modelu se provádí postupným odměřováním a následným vymodelováním daného dílu, jedná se o metodu tzv. reverzního inženýrství.
Metoda se ve strojírenství používá především pro sestrojení 3D modelu pro další konstrukční či designové úpravy. Tato metoda se dále běžně používá v architektuře pro rekonstrukci 3D modelu skutečného objektu. Další využití nachází ve vojenství pro výzkum cizích technologií. Reverzní inženýrství se v případě tvorby technologické postupu montáže využívá pro modelaci dílů Buggy 260 z důvodu nedostupnosti výrobní dokumentace.
Digitalizace spodního rámu
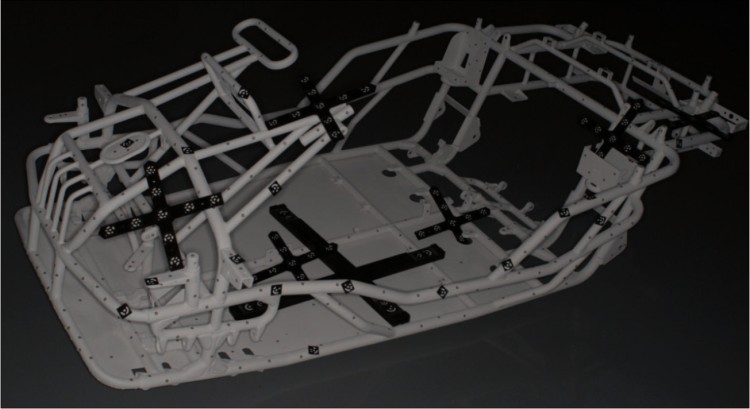
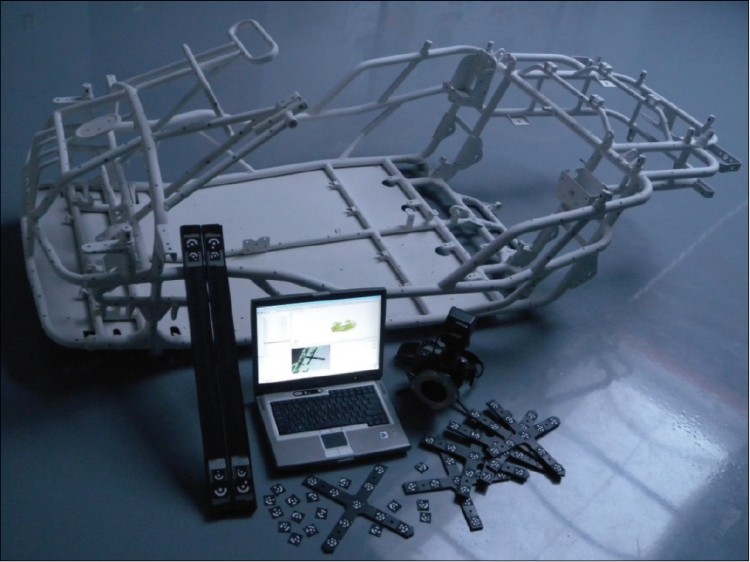
3D model spodního rámu se z důvodu složitosti a prostorové přesnosti získal pomocí technologie skenování ve spolupráci s firmou Visteon-Autopal. Skenování bylo provedeno v prostorách showroomu firmy Visteon-Autopal za použití kombinace bezkontaktních 3D skenovacích technologií Atos a Tritop. Před vlastním skenováním bylo nutné součásti experimentálního vozu demontovat, odstranit stávající lesklý povrch rámu a nahradit ho matným bílým nátěrovým systémem pro eliminaci odlesků a větší přesnost výstupu. Dále bylo nutné umístit na rám poziční značky a kříže, které slouží pro zachycení referenčních bodů.

Tritop je přenosný optický měřicí systém určený k přesnému bezkontaktnímu měření polohy diskrétních bodů, kontrastních čar (prostřihů, ostřihových hran plechu, nakreslených čar na objektu) a viditelných značek na měřeném objektu. Tato mobilní technologie nabízí efektivní měření pro aplikace kontroly kvality, deformačních analýz a digitalizace. Moderní rozhraní softwaru je uživatelsky velmi příjemné. Proces měření je založen na principech fotogrammetrie.
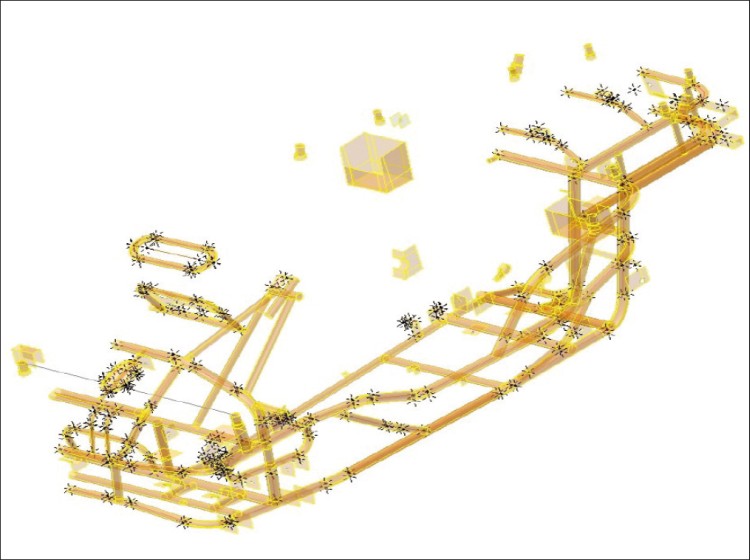
Měřený objekt je označen optickými body (samolepícími, magnetickými nebo speciálními adaptéry). Připravený objekt byl snímán digitálním fotoaparátem z různých pozic v prostoru. Na základě digitálních snímků systém Tritop vypočítá pozice fotoaparátu při jednotlivých snímcích a 3D souřadnice měřených bodů na objektu. Dále systém umožňuje zobrazení 3D souřadnic měřených bodů, pozic fotoaparátu a přesnosti měření. Následně mohou být měřené body exportovány ve standardních formátech nebo použity v systému Atos.
Atos je mobilní bezdotykový optický 3D skener určený pro nejrůznější aplikace. Jeho vysoká výkonnost, velké rozlišení a široká flexibilita měřicích objemů umožňuje přesnou a efektivní kontrolu kvality výroby a ukládání optimalizovaných dat z návrhových aplikací. Nejširší využití systém Atos nachází v oblastech CAD, CAM a FEM, kde je vyžadováno měření reálných objektů a jejich následné srovnání s teoretickým modelem. Hustota dat je daná použitým zařízením a pohybuje se v rozmezí od 800 tisíc až do 4 milionů bodů na jeden záběr.
Proces měření je založen na principech optické triangulace a fotogrammetrie. Na povrch objektu jsou promítány pruhy světla, které jsou snímány pomocí dvou kamer s CCD čipem. Software z těchto záběrů vypočítá prostorové souřadnice jednotlivých bodů. Automatické složení jednotlivých záběrů do jednoho celku je zajištěno pomocí referenčních značek umístěných na objektu nebo mimo něj. Za účelem naskenování celého objektu lze pohybovat skenerem i měřeným objektem.
CAD model z mračen bodů
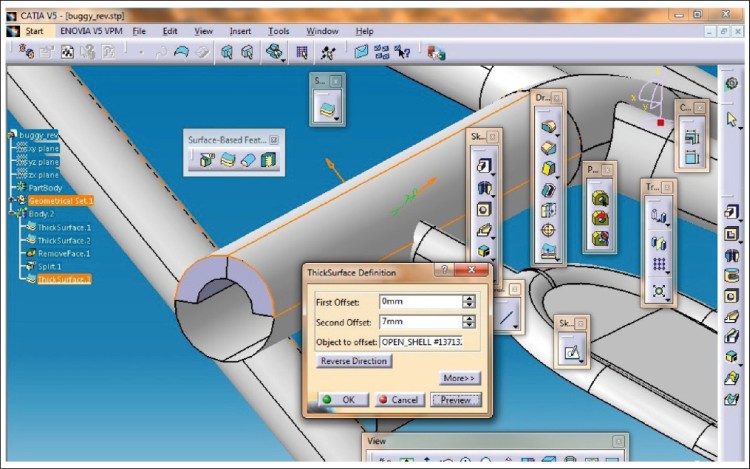
Data získaná digitalizací rámu systémem Atos se dále upravují. Výstupem dat je mrak bodů umístěný v prostoru čítající přes 70 milionů bodů. Množina bodů se odfiltruje a aproximuje do podoby množiny bodů pro další zpracování s využitím softwaru Catia. Body je dále nutné proložit konstrukčními přímkami, a z těch už je možné vytvořit primitivní plochy.
Pro vytvoření téměř identického modelu rámu buggy bylo nutné ještě převést plošné těleso na objemové. Objemové těleso bylo vytvořeno postupným přiřazováním určité tloušťky jednotlivým primitivním plochám, pak následovala úprava napojení na sebe navazujících ploch. Pro další zpracování technologického postupu montáže se převedl model součásti z programu Catia do softwaru Inventor. Transport byl proveden pomocí univerzálního datového formátu STEP, který je kompatibilní s oběma programy. Model spodního rámu a následné modelování ostatních dílů bylo provedeno v softwaru Inventor z toho důvodu, že umožňuje zjednodušenou tvorbu „rozbitých“ pohledů sestav, nutných pro vytvoření montážních výkresů.
Zpracování výkresové dokumentace
Autodesk Inventor poskytuje komplexní sadu nástrojů pro řešení 3D strojírenských návrhů, simulaci výrobků, tvorbu nástrojů a komunikaci návrhů, které mohou využívat digitální prototypy k rychlejšímu navrhování a výrobě produktu. Model z Inventoru je přesným 3D digitálním prototypem. Díky tomu umožňuje návrhy optimalizovat a ověřovat v digitální podobě.
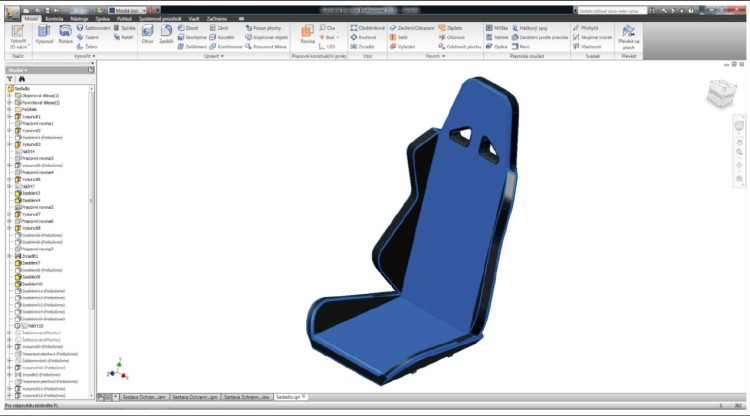
Při tvorbě montážních sestav byly použity čtyři základní prostředí programu Inventor. Jednalo se o prostředí modeláře dílů, sestav, prezentace a tvorby výkresové dokumentace. Modeláře pro konstrukci dílů se využívá pro vytvoření parametricky adaptivních 2D náčrtů, případně i 3D náčrtů, ze kterých jsou vytvořeny 3D modely pomocí operací vysunutí, rotace, tažení, šablonování a jiné.
Z vymodelovaných dílů se vytváří sestavy a podsestavy v prostředí sestav, které slouží jako podklady pro tvorbu technologického postupu. Jednotlivé díly sestav využívají parametrizace a asociativity a jsou mezi sebou spojeny pomocí vazeb, které slouží k definování přesné polohy dílů v sestavě. Dále prostředí tvorby sestav umožňuje vkládání normalizovaných dílů pomocí již definované knihovny součástí, která obsahuje nejen spojovací materiály, ale i ložiska, pera, klíny a jiné normalizované součásti. Výskyt součástí je členěn podle použití a také podle typu normy. Základní výbavou knihovny součástí jsou díly norem ANSI, BSI, GB, DIN, ISO a JIS. Při tvorbě modelu Buggy 260 byly z knihovny součástí použity díly především normy ISO a DIN. Strojní mechanismy bylo možné vytvořit pomocí tzv. Design akcelerátoru. Pro tvorbu modelu byl Design akcelerátor použit především pro vymodelování tlačných a zkrutných pružin.
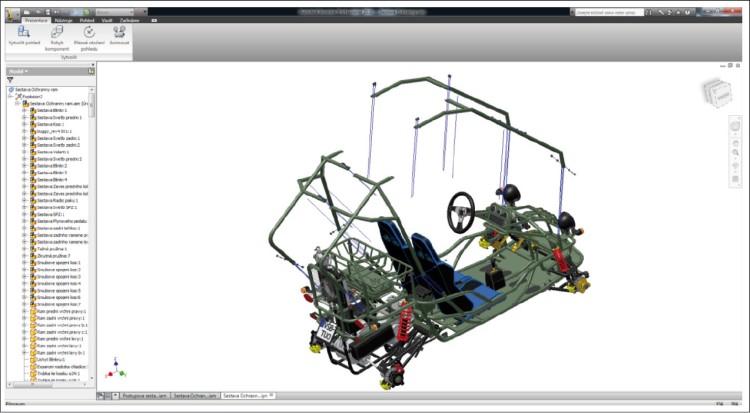
Pro tvorbu 3D rozloženého pohledu na sestavu posloužilo prostředí prezentace, které umožňovalo automaticky, nebo parametricky rozložit danou sestavu. Výstupem z prostředí prezentace může být animace postupně ze skládajících se dílů, nebo je možné použít zobrazení modelu. Zobrazení 3D rozložené sestavy se používá jako základ pro výkresy montážních sestav. Systém umožňoval animovat montáž sestavy a následně ji ukládat do videosouboru.
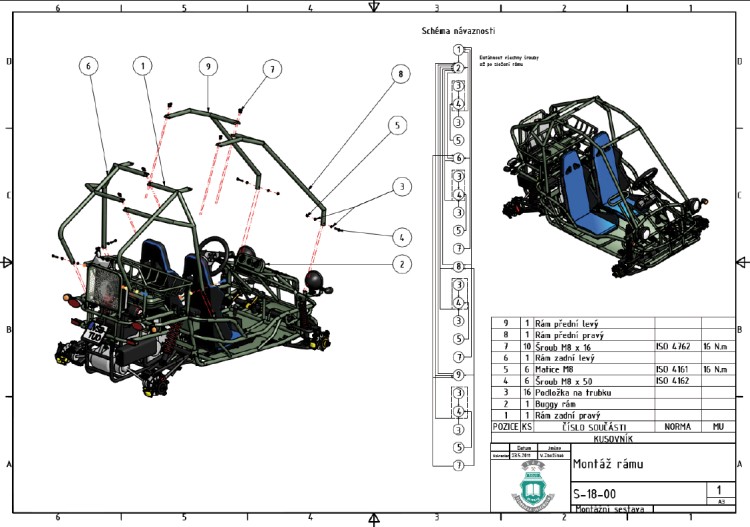
Ze 3D dokumentace se následně vytváří výkresy montážních sestav v prostředí tvorby výkresů v softwaru Inventor, které obsahují 3D model rozložené sestavy, 3D model sestavy pro složení, schéma návaznosti jednotlivých dílů a kusovník.
Pilotní montáž dle navrženého postupu
Návrh technologického postupu montáže se ověřuje pilotní montáží, která zahrnuje kontrolu návaznosti jednotlivých montážních sestav a celkové správnosti technologického postupu. Jelikož jsou navržené technologické postupy montáže zahrnuty do výukových kurzů, je nutné provést pilotní montáž před zařazením postupu do výukového kurzu.

Výukové kurzy technologie montáže jsou součástí praktického cvičení předmětu Technologie montáže oboru Materiály a technologie pro automobilový průmysl. Při implementaci navrženého technologického postupu montáže do výuky jsou přítomni odborníci z praxe jako odborný dohled. Studenti pak pod dohledem vyučujícího na základě technické dokumentace a montážních postupů provádějí kompletní montáž vozidla Buggy 260.
Připravil Marek Pagáč. Obrazový doprovod poskytla Katedra materiálů a technologií pro automobily VŠB-TU v Ostravě.








